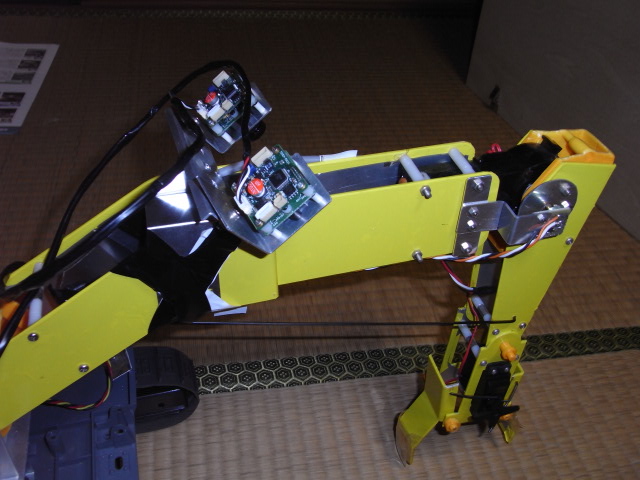
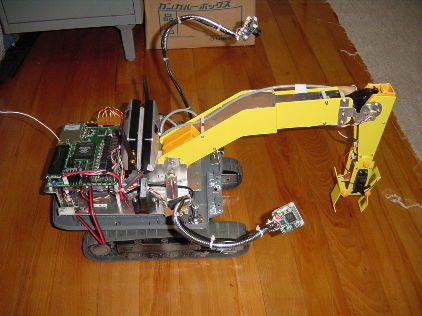
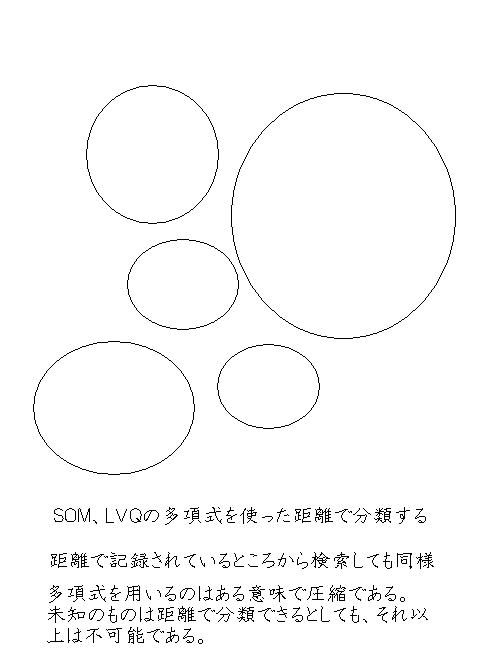
4月から基本的な図形を使用して対象を記述する方法にするプログラムを製作中。
オントロジーとは違う体系の知識表現を作ろうかと検討、
オントロジーは文字列だけでの記述であるから、イメージレベルが伴わない不都合がある。
カテゴリーが類似しているかどうかは人間が記述するのでどこまでやっても終わりがないと思う。
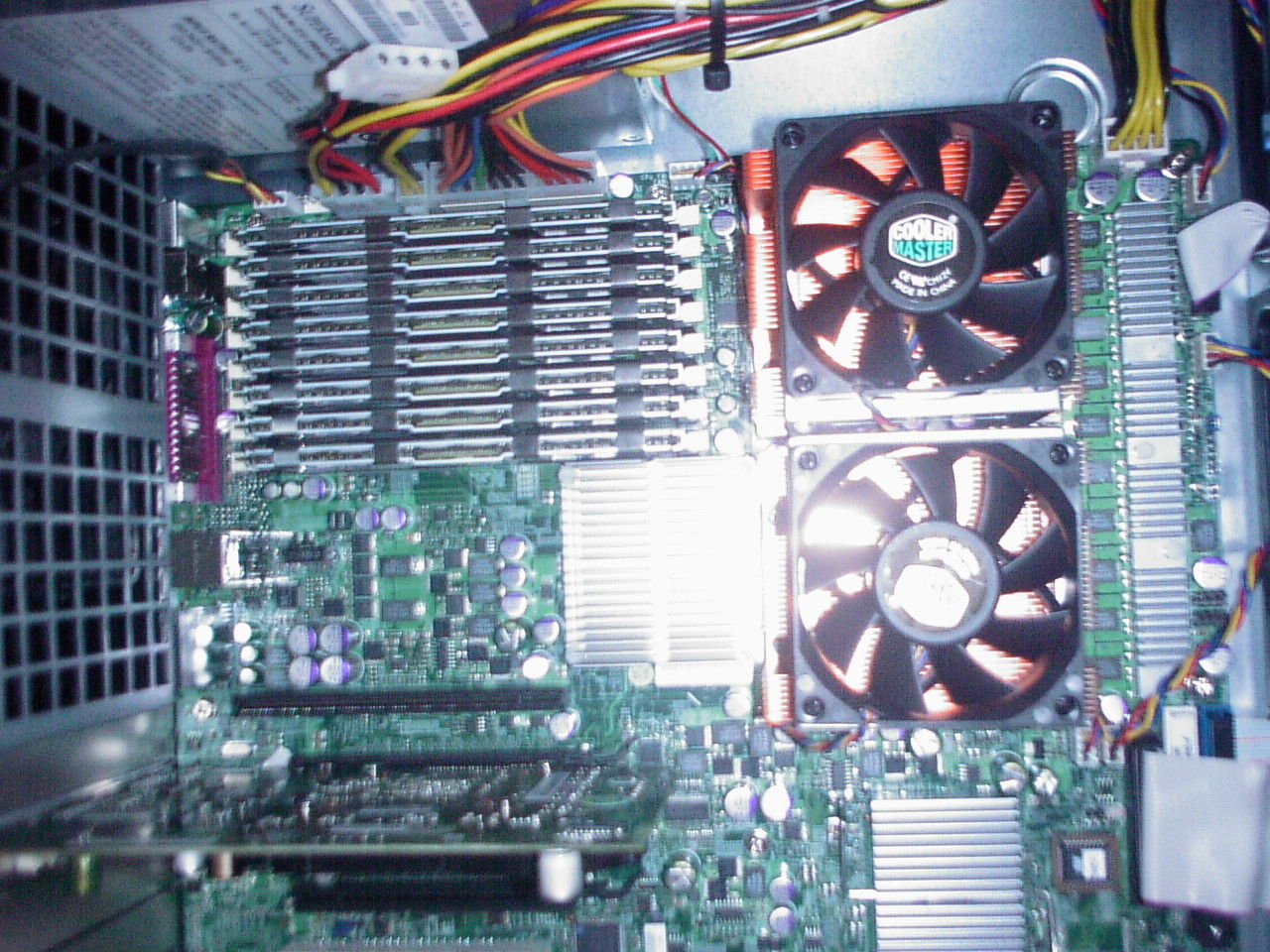
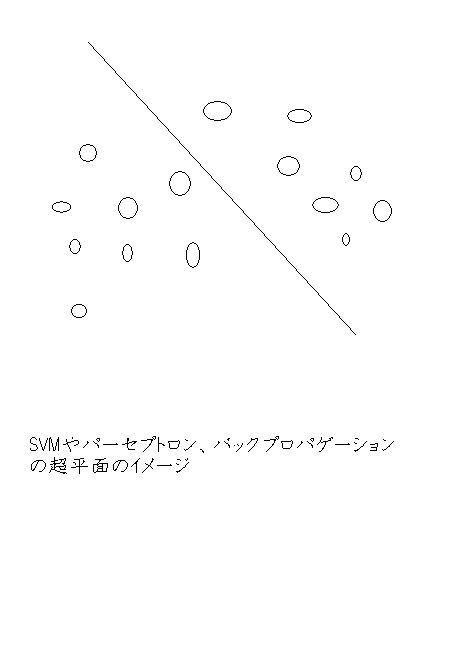
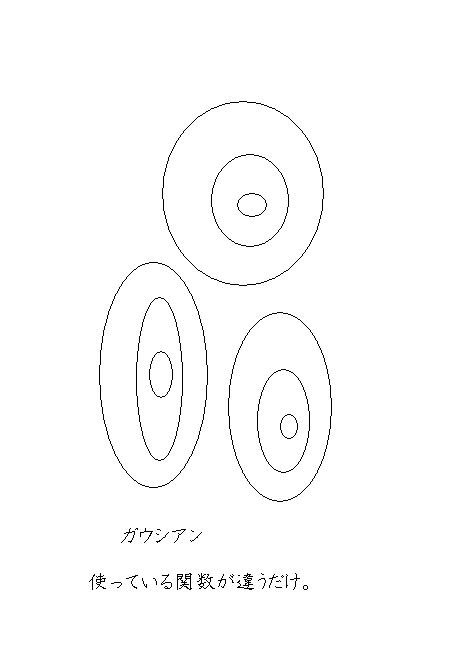
Back PropagationをCUDAで作ろうとする。
50x50 10x10 50x50で構成したがいまひとつ学習定数、結合係数が調整が面倒である。
数学はcycorpではthingの下である。
これは心身二元論を超えて三元論である。
数学の概念は簡単に作れるものではない。
数学を取り込むことを考える。
プラトンのイデア論では、プロトタイプの生成は謎であるが、
それと同様に、数学はどうして出来上がったのかと言うことを追求しても無理である。
AMという色々な定理を作るプログラムが30年以上前にあったそうだか、
mudという意味の無い羅列を沢山作り上げて、
数学の意味のある定理を作ることは一部だけ出来たそうである。
結局、概念を作ると言うことは、
アミノ酸に放電して生物を作る試みをするようなものである。
新しいものも書類作成中、
更に新しいもの開発中、
Philosophy and the Mirror of Nature
Richard
Rorty
邦題、哲学と自然の鏡http://press.princeton.edu/titles/778.html
古代から近代までの哲学の全部を混ぜて書いているんですが、
ビントゲンシュタインとラッセルやフッサールまでで、ハイデッカーの後からはどうでも良いです。
サルトルだのデリダとかフーコーとかは何もすることなくなって言葉遊びの世界です。
カントの物自体というところから、コンピュータで情報処理するレベルではフッサールや、
ヴントゲンシュタイン、ラッセルのゲームの例題は分類の話で実用的だけれど、
後の時代の実存なんていうのを前に出したものは何なんだろうかと、
唯物論は成り立つわけありません。
ルドルフカルナップの言う擬似命題は、さらに考えてみれば言葉で表せるものは全部命題です。
情報として処理しなければならない対象に他なりません。
ルドルフカルナップの擬似命題の中に、
Aristole is prime number.
とあって、アリストテレスは素数である、と書いてありますが、
アリストテレスは素数である、と書いてあったら、単なる誤訳ではないかと思いませんか。
素数と言うのが何か別の意味である考えませんか。
完全に擬似命題と言う物は作れないと思います。
逆に、擬似命題と言うカテゴリーが出来てしまっているのですから、
記号にして記述したものは全てが命題です。